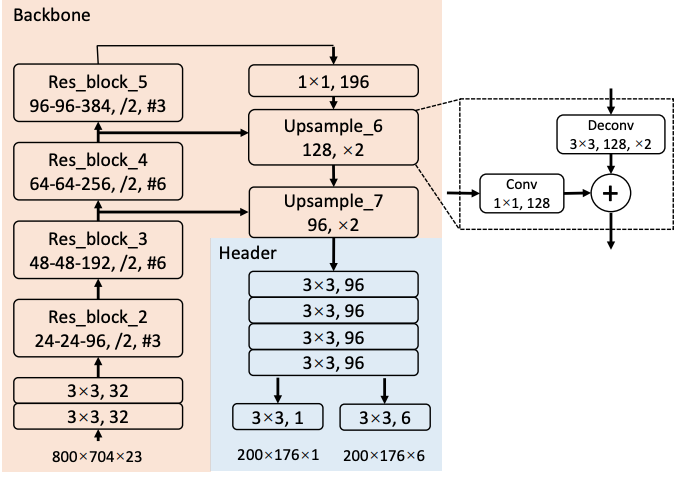
随着无人驾驶的兴起,激光雷达数据的目标检测成为了这几年的研究热点之一。常见的 3D 检测模型可以分成两类,一类是用 3D 小方格代表所有的激光点数据,每个小方格包含了这个方格内的特征,例如 VoxelNet 和 Vote3deep 。另一类则是先把三维信息投射到一个二维平面,通常是鸟瞰图 (BEV, Bird Eye View) 或是正视图 (Range View),生成二维特征图后再用传统的二维目标模型检测图中的物体,例如 MV3D 和 FaF。无人驾驶场景中的大多数的目标物体都处在同一地面上,非常适合 BEV。相比正视图,BEV 中的目标在不同位置大小固定,我们可以用已知的常见物体大小优化……